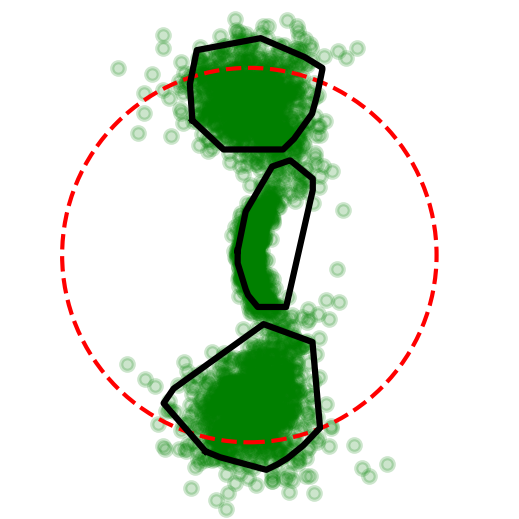
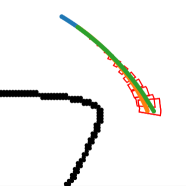
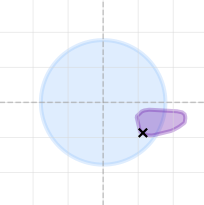
Conformal prediction is a statistical tool for producing prediction regions for machine learning models that are valid with high probability. A key component of conformal prediction algorithms is a non-conformity score function that quantifies how different a model’s prediction is from the unknown ground truth value. Essentially, these functions determine the shape and the size of the conformal prediction regions. However, little work has gone into finding non-conformity score functions that produce prediction regions that are multi-modal and practical, i.e., that can efficiently be used in engineering applications. We propose a method that optimizes parameterized shape template functions over calibration data, which results in non-conformity score functions that produce prediction regions with minimum volume. Our approach results in prediction regions that are multi-modal, so they can properly capture residuals of distributions that have multiple modes, and practical, so each region is convex and can be easily incorporated into downstream tasks, such as a motion planner using conformal prediction regions. Our method applies to general supervised learning tasks, while we illustrate its use in time-series prediction. We provide a toolbox and present illustrative case studies of F16 fighter jets and autonomous vehicles, showing an up to 68% reduction in prediction region area.
 Zero-Shot Context Identification through Clustering and Foundation Modeling for Friction EstimationIn ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics, May 2025
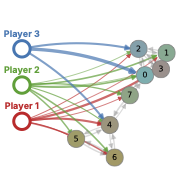
Zero-Shot Context Identification through Clustering and Foundation Modeling for Friction EstimationIn ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics, May 2025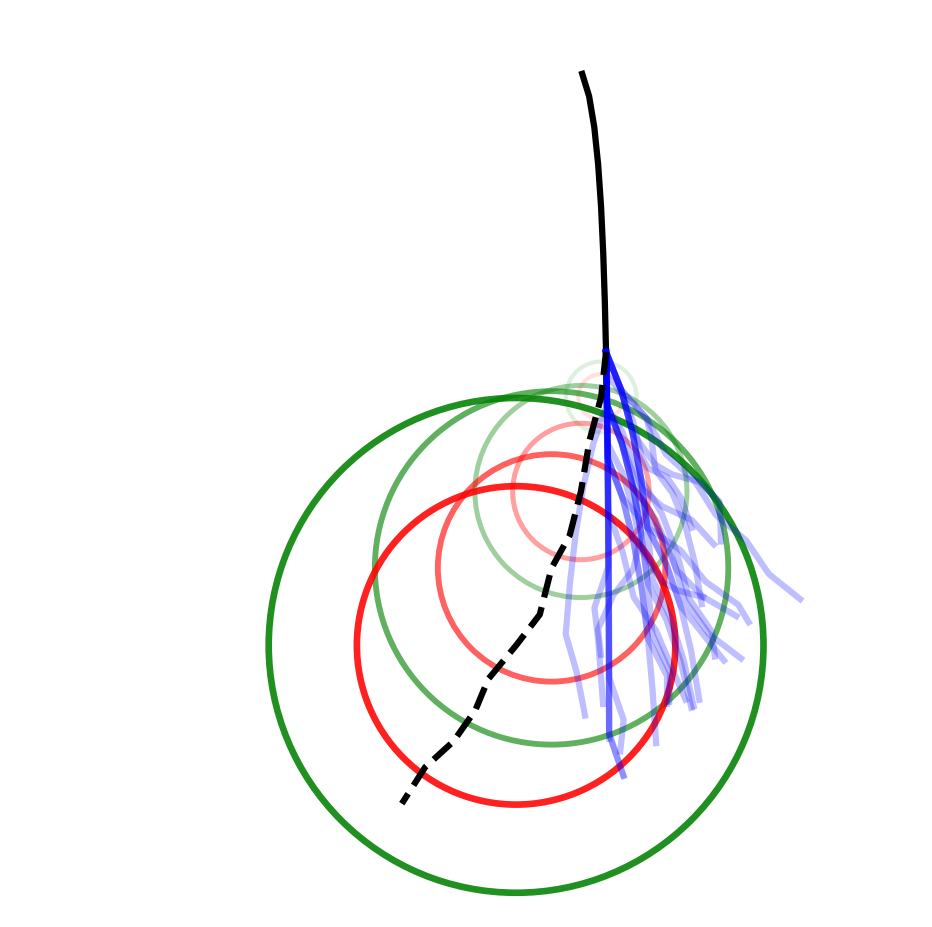 Conformal Off-Policy Prediction for Multi-Agent SystemsIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024
Conformal Off-Policy Prediction for Multi-Agent SystemsIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024