Neurosymbolic Learning
Learning with structure, constraints, and physical consistency from physics or dynamics
Physics-Constrained Learning (PCL) uses prior knowledge about system dynamics as strong inductive biases in machine learning models. By incorporating known dynamical models directly into the learning process, PCL improves prediction accuracy, enables rapid online adaptation, and ensures physical feasibility—all while reducing data and computational requirements.
Motivation
Autonomous systems often operate under strict data and compute constraints. Rather than relying solely on unconstrained neural networks, PCL leverages the structure of system dynamics to improve learning efficiency and safety. This approach is complementary to physics-informed neural networks (PINNs), which use dynamics equations as soft constraints; PCL instead directly constrains predictions through the dynamics themselves.
Improving Prediction Accuracy with PCL
Prediction of agent trajectories is critical for safe autonomous navigation. Traditional approaches train unconstrained neural networks to minimize prediction error on historical data, without incorporating known physics. PCL reformulates this problem by incorporating dynamics constraints.
Instead of unconstrained prediction: \(\phi^* = \arg\min_{\phi} \mathbb{E}_{\mathcal{D}} \left[\sum_{i=1}^{T}\|x(t+i) - \hat{x}(t+i)\|^2 \right]\)
PCL predicts control inputs and integrates them with known dynamics: \(\hat{x}(t+1) = \int_t^{t+1} f(\hat{x}(t),u(t);\theta)\,dt\)
This ensures dynamically feasible predictions while allowing the neural network to focus on learning driver behavior (control inputs) rather than approximating complex dynamics. Gradients backpropagate through the dynamics, enabling end-to-end learning.
Key benefit: Physics-constrained predictions are guaranteed to obey system dynamics by construction, not learned approximately from data.
See: Physics Constrained Motion Prediction with Uncertainty Quantification [1]
Learning Control Policies with PCL
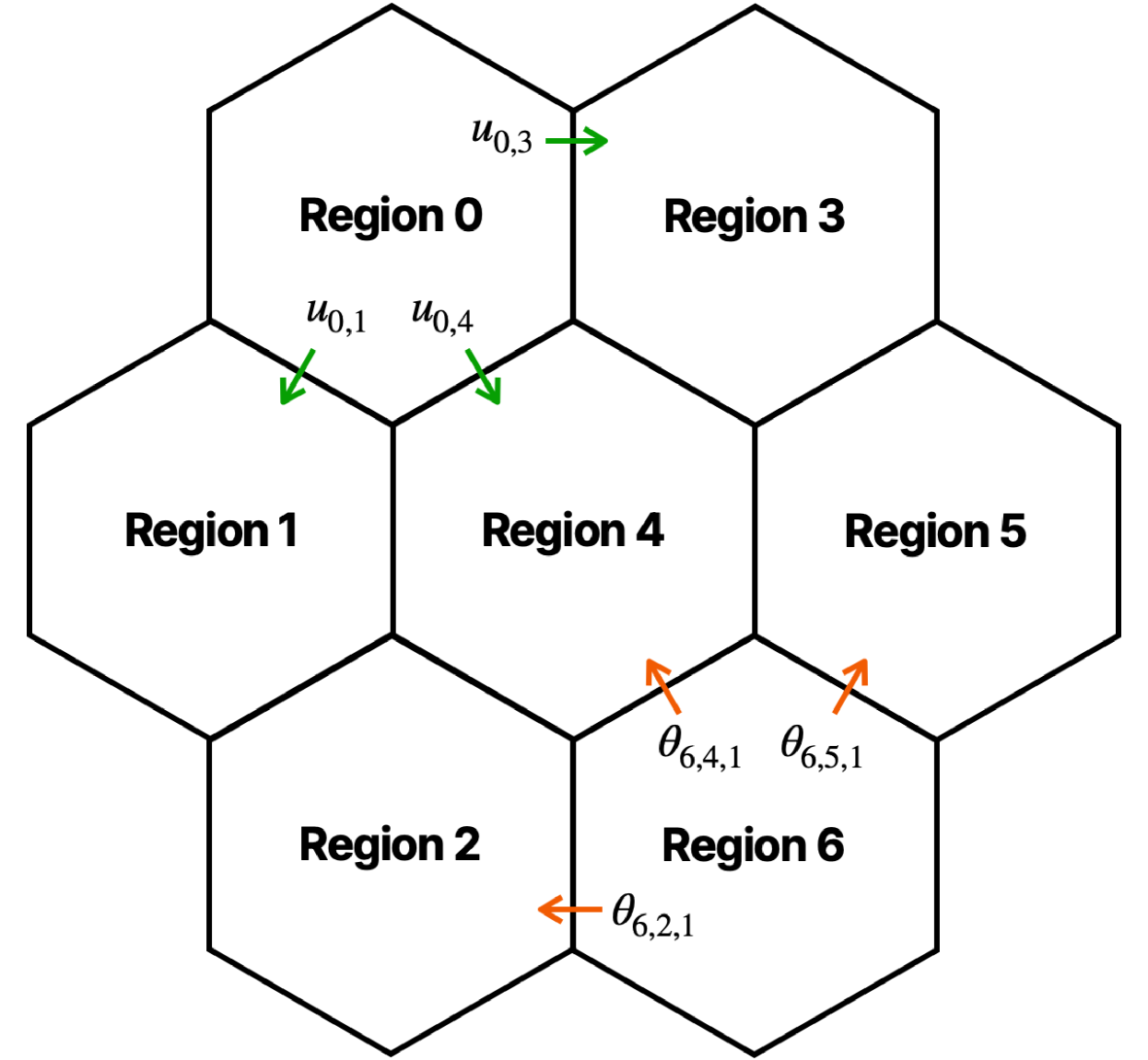
By replacing prediction objectives with cost minimization, PCL enables learning of optimal control policies. This is particularly effective for large-scale systems where traditional model predictive control (MPC) becomes computationally intractable.
Example: In traffic control, differentiable predictive control achieves:
- 4 orders of magnitude reduction in computation time
- Up to 37% improvement in traffic performance
See: Differentiable Predictive Control for Large-Scale Urban Road Networks [2]
Identifying System Dynamics with PCL
PCL can efficiently identify unknown system parameters from limited data by using the dynamics model as a strong inductive bias. This enables rapid online adaptation when system properties change (e.g., surface friction for ground vehicles).
Key advantage: The strong prior provided by the dynamics model enables accurate parameter identification with minimal data, allowing deployment of autonomous systems in changing environments.
See: Zero-Shot Context Identification through Clustering and Foundation Modeling for Friction Estimation [3]
References
2025
-
 Zero-Shot Context Identification through Clustering and Foundation Modeling for Friction EstimationIn ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics, May 2025
Zero-Shot Context Identification through Clustering and Foundation Modeling for Friction EstimationIn ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics, May 2025